Software
SSEM
Syndemic and Syndemogenesis Elements Modeler
SMAS
Soil Morphological analysis software
ArcheoMich
Study of ancient rest, funerary traditions and Archeological objects
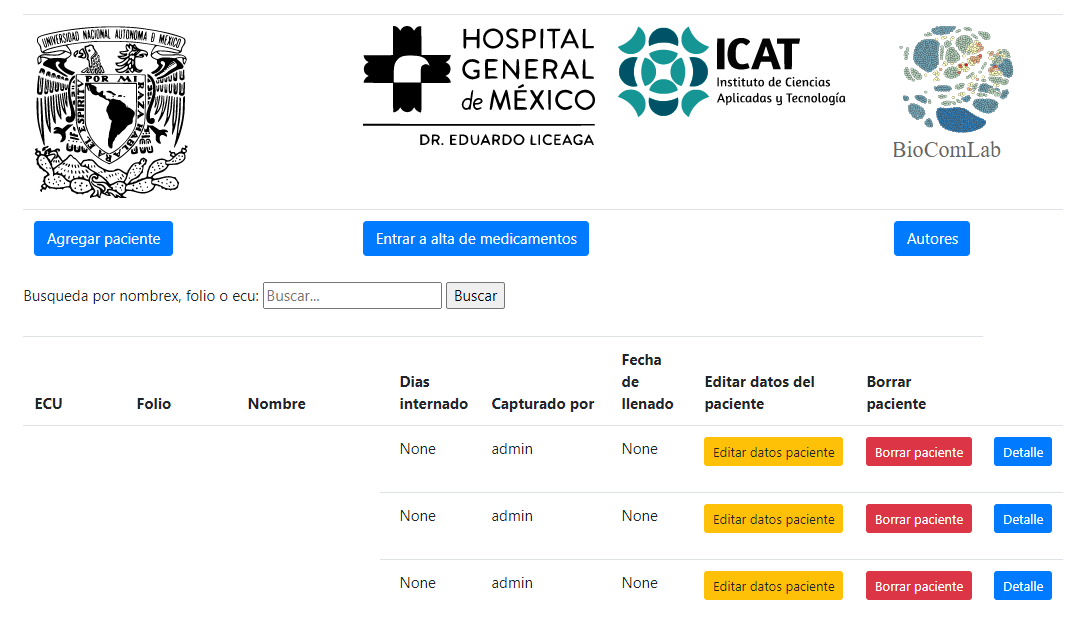
EXCELEN-19
Study of ancient rest, funerary traditions and Archeological objects
COVID apps
Projects developed to aid during the COVID-19 pandemic